- إنضم
- 31 يناير 2017
- المشاركات
- 2,288,711
- مستوى التفاعل
- 47,630
- النقاط
- 113
اختبار قارب روبوتي لرسم خرائط لقاع البحار والمحيطات

قارب آلي لمسح قاع المحيطات
تختبر البحرية الملكية قاربًا آليًا مصممًا لمسح قاع البحار أو المحيطات المجهولة كجزء من تجارب لبحث إمكانية استخدام سفن ذاتية التحكم في عمليات المسح العسكري.
وفقا لما نشره موقع New Atlas، تم اختبار قارب Otter Pro على بحيرة هورسي ببورتسموث من قبل فريق Navy's Project Hecla بهدف استخدام مجموعة من أجهزة الاستشعار لرسم قاع البحيرة.

أسرار في قاع البحار والمحيطات
من أهم إنجازات البحرية البريطانية، وإن كانت أقل شهرة، هي رسم خرائطها الواسعة للمياه في جميع أنحاء العالم، والتي تقدم فوائد عظيمة للبحارة لأنها تزودهم برسوم بيانية دقيقة، بعضها تغير قليلاً بمرور العقود والقرون، مما يفرض القيام بتحديث معظمها باستمرار.
تكمن المشكلة ببساطة في أن قاع البحر يشهد الكثير من المتغيرات ما بين تآكل مستمر وتراكم رواسب وتعرض للزلازل وتغير مستوى سطح البحر وتغير التيارات. وبالطبع، يلعب النشاط البشري أيضًا دورًا مؤثرًا من خلال أعمال التجريف وتعديل القنوات وتحريك العوامات وتحطم الطائرات وغرق السفن وجميع أنواع البناء والإغراق والتدمير.
مهام سيزيفية
للتعامل مع المهام اللامتناهية في مسح قاع البحار والمحيطات، تتطلع البحرية إلى استخدام قوارب ذاتية التحكم أو يتم التحكم فيها عن بُعد لتخفيف جانب من الأعباء وتقليل المخاطر.
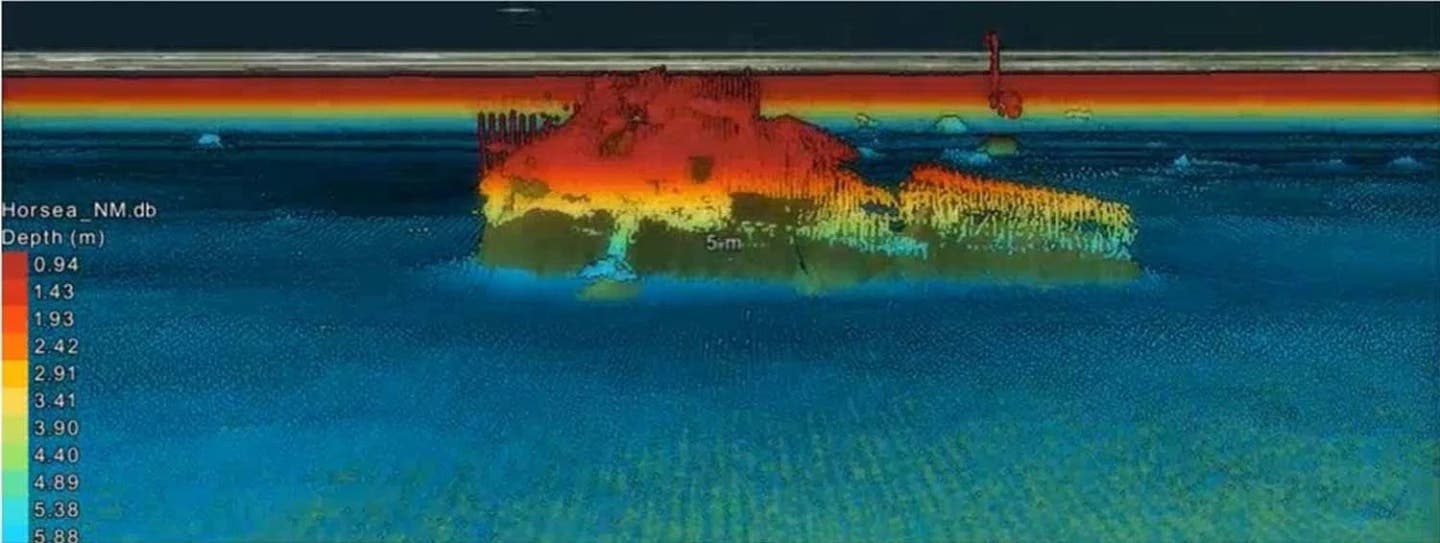
في هذا السياق، تم اختبار القارب Otter Pro على بحيرة هورسي، التي تبلغ مساحتها 7000 متر مربع، لجمع صور السونار للمياه وقاع البحر والأشياء الموجودة في القاع.استغرقت التجربة ساعتين، تم خلالهما رسم خريطة الاضمحلال والانهيار الهيكلي لطراد نهاري غارق وقارب بمحرك وهليكوبتر، بالإضافة إلى اكتشاف خطوط السباحة وتآكل قاع البحر الناجم عن عمليات الغوص.
عمليات مستقبلية معقدة
ومن المقرر أن تنتقل التجارب إلى بيئة أكثر تعقيدًا، حيث سيُظهر قارب Otter Pro الروبوتي قدرة على معالجة البيانات في الوقت الفعلي تقريبًا بالإضافة إلى اختبار مسبار الصدى متعدد الحزم Norbit وأجهزة السونار الأخرى، بما سيساعد على تحسين مفاهيم التشغيل المستقبلية للسفن الروبوتية في تطبيقات المسح العسكري المستقبلية.
شارك في إجراء الاختبار فريق من ثلاثة أشخاص دون الحاجة إلى قارب مرافق قارب أو رصيف بحري للانطلاق منه أو لعودة القارب الروبوتي للرسو عليه. أثناء المسح، عمل اثنان من الفريق في مهام توجيه القارب الروبوتي وتشغيل أجهزته فيما كان العضو الثالث بالفريق مسؤولا عن معالجة البيانات في الوقت الفعلي تقريبًا.
